
Page 206 - PortescapCatalog 0212_V012021CN_A4
P. 206
工程师附录
P430步进电机每转100步。为通过使用步进角为3.6°的步进电机将负载移动0.50弧度,需使电机移动 8步。
0.50 rad = 28.65°
28.65°/3.6° = 7.96 电机需行进8步
等同于 25 rad/s的起动频率为:
f = (25 rad/s / 2π rad/rev) x 100 steps/rev = 398 steps/s
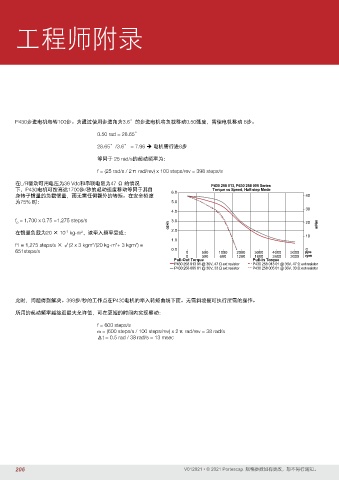
在L/R驱动可用电压为36 Vdc和串联电阻为47 Ω 的情况 P430 258 013, P430 258 005 Series
下,P430电机可按高达1700步/秒的起动速度移动等同于其自 6.0 Torque vs Speed, Half-step Mode
身转子惯量的负载惯量,而无需任何额外的转矩。在安全裕度 40
为75% 时: 5.0
30
4.0
f = 1,700 x 0.75 =1,275 steps/s 3.0 20
0
oz-in mNm
在惯量负载为20 × 10 kg-m ,该牵入频率变成: 2.0
2
-7
10
1.0
f1 = 1,275 steps/s × √(2 x 3 kgm /(20 kg-m + 3 kgm ) =
2
2
2
0
651steps/s 0.0 0 500 1000 2000 3000 4000 5000 pps
rpm
0 300 600 1200 1800 2400 3000 rpm
Pull-Out Torque Pull-In Torque
P430 258 013 01 @ 36V, 47 Ω ext resistor P430 258 013 01 @ 36V, 47 Ω ext resistor
P430 258 005 01 @ 36V, 33 Ω ext resistor P430 258 005 01 @ 36V, 33 Ω ext resistor
此时,问题得到解决。398步/秒的工作点在P430电机的牵入转矩曲线下面。无需斜坡便可执行所需的操作。
所用的起动频率越接近最大允许值,可在更短的时间内实现移动:
f = 600 steps/s
ω = (600 steps/s / 100 steps/rev) x 2π rad/rev = 38 rad/s
Δt = 0.5 rad / 38 rad/s = 13 msec
206 V012021 • © 2021 Portescap. 规格参数如有更改,恕不另行通知。