
Page 209 - PortescapCatalog 0212_V012021CN_A4
P. 209
永磁步进电机计算
例子:配备带有摩擦转矩负载的永磁步进电机的驱动
在本应用中,我们考虑适合带载间歇运行的步进电机。应用需求如下:
可用电压: 24 Vdc
可用电流: 2 Amp
电机工作点: 67.5° [θ] 所需电机位置
15 mNm [τ] 所需电机转矩
0.06 [Δt] 所需移动时间
间隙运营
如果使用步进角为7.5°的步进电机,该电机必须运行9步,才可移动67.5°。
67.5°/7.5° = 9 steps f = step rate = 9 steps /0.06 sec = 150 steps /s
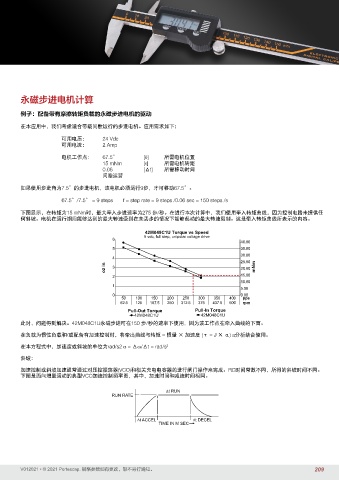
下图显示,在转矩为15 mNm时,最大牵入步进速率为275 步/秒。在进行本次计算中,我们使用牵入转矩曲线,因为控制电路未提供任
何斜坡。电机在运行期间能够达到的最大转速受到在未丢步的情况下能够起动的最大转速限制。这是牵入转矩曲线所表示的内容。
42M048C1U Torque vs Speed
5 vdc, full step, unipolar voltage drive
6
40.00
5 35.00
30.00
4
25.00
oz in 3 20.00 mNm
2 15.00
10.00
1
5.00
0 0.00
50 100 150 200 250 300 350 400 pps
62.5 125 187.5 250 312.5 375 437.5 500 rpm
Pull-Out Torque Pull-In Torque
42M048C1U 42M048C1U
此时,问题得到解决。42M048C1U永磁步进可在150 步/秒的速率下使用,因为该工作点在牵入曲线的下面。
在负载为惯性负载和/或配备有加速控制时,将牵出曲线与转矩 = 惯量 × 加速度 (τ = J × α) a分析结合使用。
在本方程式中,加速度或斜坡的单位为rad/s2 α = Δω/Δt = rad/s 2
斜坡:
加速控制或斜坡加速通常通过对压控振荡器(VCO)和相关充电电容器的进行闸门操作来完成。RC时间常数不同,所得的斜坡时间不同。
下图是面向增量运动的典型VCO加速控制频率图,其中,加速时间和减速时间相同。
∆t RUN
RUN RATE
∆t ACCEL ∆t DECEL
TIME IN M SEC
V012021 • © 2021 Portescap. 规格参数如有更改,恕不另行通知。 209